Первая глобальная гоночная серия для болидов-беспилотников Roborace стартует в конце 2016 года в рамках чемпионата FIA Формулы-E. (А мы ещё посмеивались над итальянцами, мечтавшими о кольцевой гонке беспилотников в марте.) Каждый заезд будет проходить перед обычными состязаниями электрической формулы на той же трассе. Участвовать должны 10 команд, у каждой — по две машины. По замыслу устроителей, такой формат обеспечит конкурентную среду для разработчиков ПО. Кстати, в Формуле-Е сезон не совпадает с календарным годом. Например, текущий стартовал в октябре 2015-го, а завершится в июле 2016 года. А вот предыдущий, он же первый в истории данной формулы, был завершён летом 2015-го. В личном зачёте его выиграл Нельсон Пике-младший. Интересно, кто будет чемпионом в Roborace — программист?

Только на поверхностный взгляд кажется, что достаточно занести в память последовательность поворотов, и дело в шляпе. Беспилотник на кольцевой трассе должен «понимать», что происходит, реагировать на заносы и сносы, видеть поребрики и прочее, контролировать скорость вхождения в поворот и выбирать момент для открытия газа на выходе. Своя специфика и у городских трасс, используемых в Формуле-Е. Впрочем, всё это достижимо.

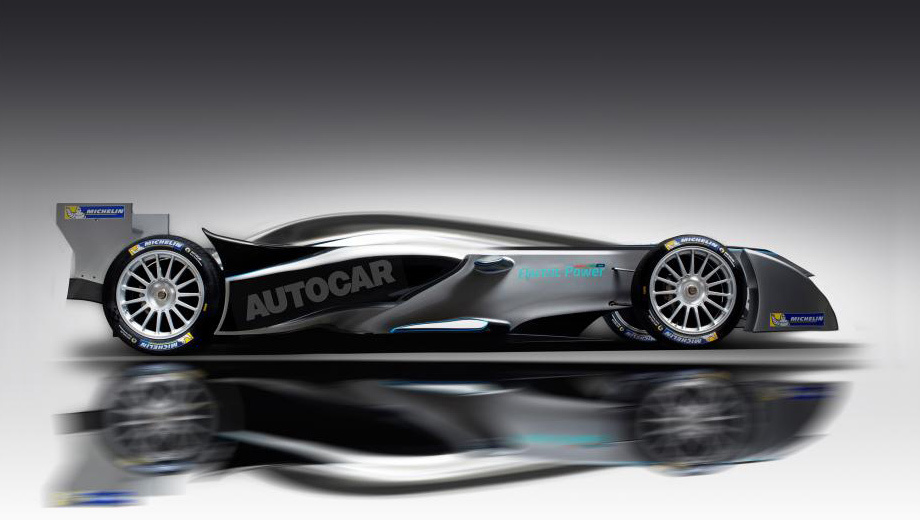
В качестве примера подобной технологии стоит вспомнить беспилотный Audi RS 7 (ранний вариант под именем Бобби), который в 2014 году в автономном режиме прошёл трассы Ascari и Hockenheimring, достигнув на последней 240 км/ч. В июле 2015-го улучшенный вариант, Робби, уже вовсю нарезал круги на калифорнийской трассе Sonoma Raceway, а в нынешнем месяце промчался по кольцу FAST Parcmotor близ Барселоны (4,2 км, на фото вверху) за хорошее время в 2:07.67.
История
Первая гонка автомобилей-роботов DARPA Grand Challenge, устроенная научно-исследовательским агентством Пентагона, состоялась в 2004 году. Задача была поставлена довольно жёстко — беспилотные машины, руководствуясь цифровой картой, должны были пройти около 230 км по пустынной местности в Калифорнии (старт) и Неваде (финиш). На старт вышли 15 машин, созданных в различных компаниях и университетах. Они не просто считывали строго заданный маршрут, но видели обстановку вокруг, самостоятельно выбирали тот или иной путь в рамках общего направления к цели.

К сожалению, ни один из участников исторического соревнования до финиша не добрался. Кто-то перевернулся на кочках, кто-то заблудился, кто-то просто заглох и встал. Лучшим результатом было прохождение более 11 км. Тем не менее устроители посчитали и это прорывом. Только подумайте, ведь машинами никто не управлял извне, а гонка проходила на пересечённой местности. Через год мероприятие повторили, воспользовавшись на этот раз замкнутым 212-километровым маршрутом в пустыне Мохаве и увеличив приз вдвое. На старте — уже 23 машины-робота, а на финише — целых пять!
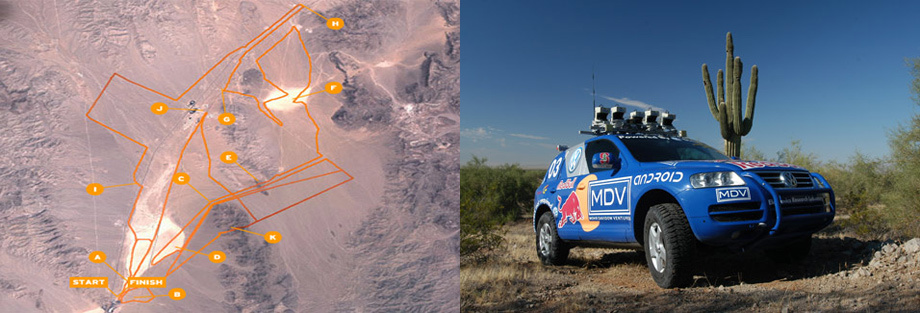
В 2007 году гонку перенесли в закрытую городскую среду и переименовали в DARPA Urban Challenge. Правда, назвать это гонкой в буквальном смысле было нельзя: машины соревновались уже в соблюдении ПДД и должны были выполнить несколько заданий, не сталкиваясь с другими автомобилями и пешеходами. Время, конечно, тоже фиксировалось. Победил внедорожник Boss, то есть Tahoe, переделанный специалистами Университета Карнеги-Меллон в робота. Соревнование придало мощный импульс исследованиям в области машин-беспилотников по всему миру. Но это уже другая история.